
内容纲要
ROS文件系统
文件系统结构
ROS文件系统级指的是在硬盘上ROS源代码的组织形式,其结构大致可以如下图所示:
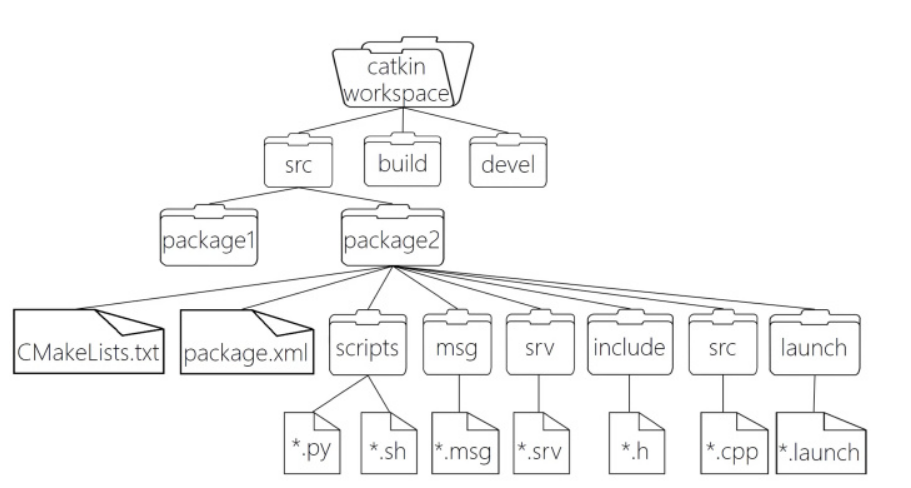
WorkSpace --- 自定义的工作空间
|--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
|--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
|--- src: 源码
|-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
|-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件
|-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
|-- scripts 存储python文件
|-- src 存储C++源文件
|-- include 头文件
|-- msg 消息通信格式文件
|-- srv 服务通信格式文件
|-- action 动作格式文件
|-- launch 可一次性运行多个节点
|-- config 配置信息
|-- CMakeLists.txt: 编译的基本配置
相关命令
1.增
catkin_create_pkg 自定义包名 依赖包 === 创建新的ROS功能包
sudo apt install xxx === 安装 ROS功能包
2.删
sudo apt purge xxx ==== 删除某个功能包
3.查
rospack list === 列出所有功能包
rospack find 包名 === 查找某个功能包是否存在,如果存在返回安装路径
roscd 包名 === 进入某个功能包
rosls 包名 === 列出某个包下的文件
apt search xxx === 搜索某个功能包
4.改
rosed 包名 文件名 === 修改功能包文件
需要安装 vim
比如:rosed turtlesim Color.msg
5.执行
5.1roscore
roscore === 是 ROS 的系统先决条件节点和程序的集合, 必须运行 roscore 才能使 ROS 节点进行通信。
roscore 将启动:
- ros master
- ros 参数服务器
- rosout 日志节点
用法:
roscore或(指定端口号)
roscore -p xxxx5.2rosrun
rosrun 包名 可执行文件名 === 运行指定的ROS节点
比如:rosrun turtlesim turtlesim_node
5.3roslaunch
roslaunch 包名 launch文件名 === 执行某个包下的 launch 文件
Comments NOTHING