
内容纲要
GPIO笔记
GPIO简介
•GPIO(General Purpose Input Output)通用输入输出口
•可配置为8种输入输出模式
•引脚电平:0V~3.3V,部分引脚可容忍5V
•输出模式下可控制端口输出高低电平,用以驱动LED、控制蜂鸣器、模拟通信协议输出时序等
•输入模式下可读取端口的高低电平或电压,用于读取按键输入、外接模块电平信号输入、ADC电压采集、模拟通信协议接收数据等
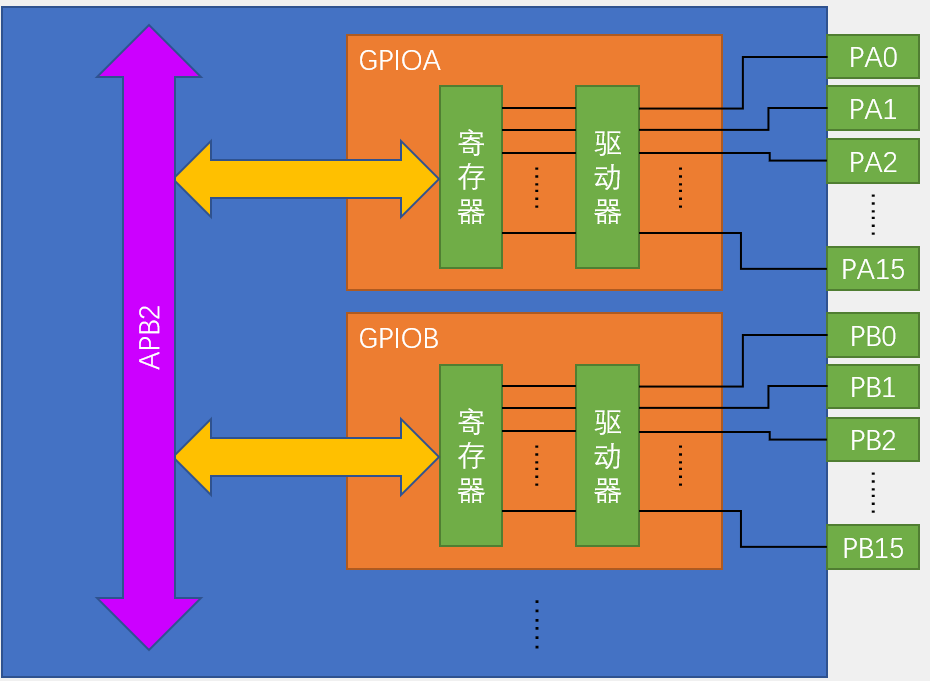
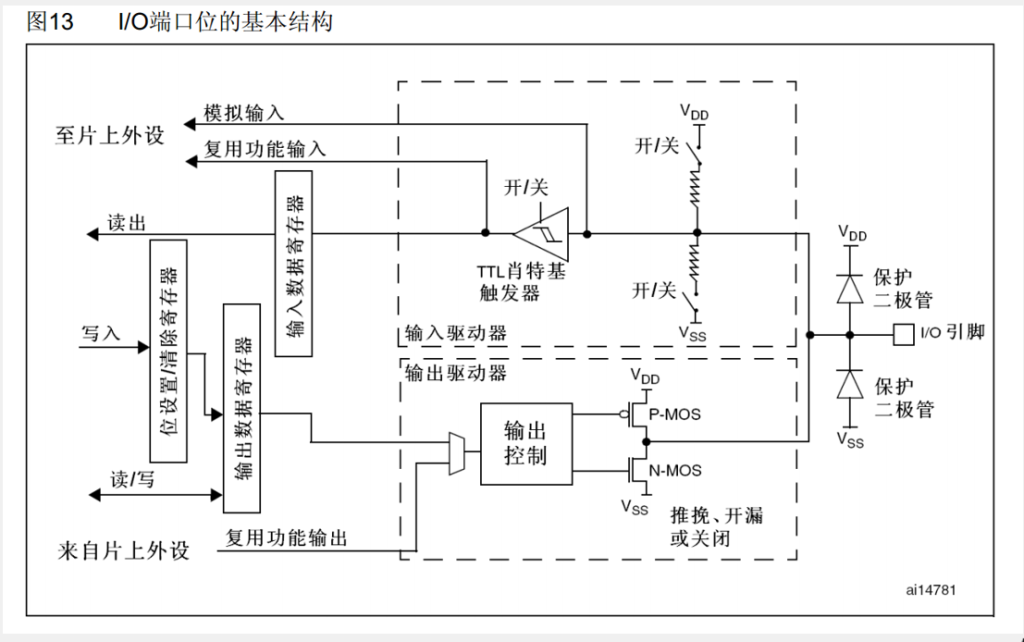
GPIO基本结构
打通步骤(以LED灯为例)
一、RCC开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 正点原子红LED灯
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE, ENABLE); // 正点原子绿LED灯二、配置GPIO口
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitTypeDef GPIO_InitStructure2;
GPIO_InitStructure2.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure2.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure2.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOE, &GPIO_InitStructure2);三、设置高电平关灯(LED灯)
GPIO_SetBits(GPIOB, GPIO_Pin_5);
GPIO_SetBits(GPIOE, GPIO_Pin_5);GPIO位结构
简单了解即可
GPIO的八种输入输出模式

对应参数
typedef enum
{ GPIO_Mode_AIN = 0x0, // 模拟输入
GPIO_Mode_IN_FLOATING = 0x04, // 浮空输入
GPIO_Mode_IPD = 0x28, // 下拉输入(In Pull Down)
GPIO_Mode_IPU = 0x48, // 上拉输入(In Pull Up)
GPIO_Mode_Out_OD = 0x14, // 开漏输出(Out Open Drain)
GPIO_Mode_Out_PP = 0x10, // 推挽输出(Out Push Pull)
GPIO_Mode_AF_OD = 0x1C, // 复用开漏输出(Atl Open Drain)
GPIO_Mode_AF_PP = 0x18 // 复用推挽输出(Atl Push Pull)
}GPIOMode_TypeDef;部分API
void GPIO_DeInit(GPIO_TypeDef* GPIOx); // 复位GPIO外设 ——(参数:GPIOx)
void GPIO_AFIODeInit(void); // 复位AFIO外设
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct); // 初始化GPIO口(先定义一个结构体变量,再赋值,再调用)
void GPIO_StructInit(GPIO_InitTypeDef* GPIO_InitStruct); // 给结构体变量赋默认值
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); // GPIO读取函数
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx); // GPIO读取函数
uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); // GPIO读取函数
uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx); // GPIO读取函数
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); // GPIO写入函数,将指定端口设置为高电平
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); // GPIO写入函数,将指定端口设置为低电平
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal); // GPIO写入函数,根据第三个参数值来指定端口
void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal); // GPIO写入函数 (参数一:选择外设,参数二:对最多16个端口进行写入操作)
void GPIO_PinLockConfig(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_EventOutputConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);
void GPIO_EventOutputCmd(FunctionalState NewState);
void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState); //引脚重映射
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);
void GPIO_ETH_MediaInterfaceConfig(uint32_t GPIO_ETH_MediaInterface);实验部分
LED和蜂鸣器简介
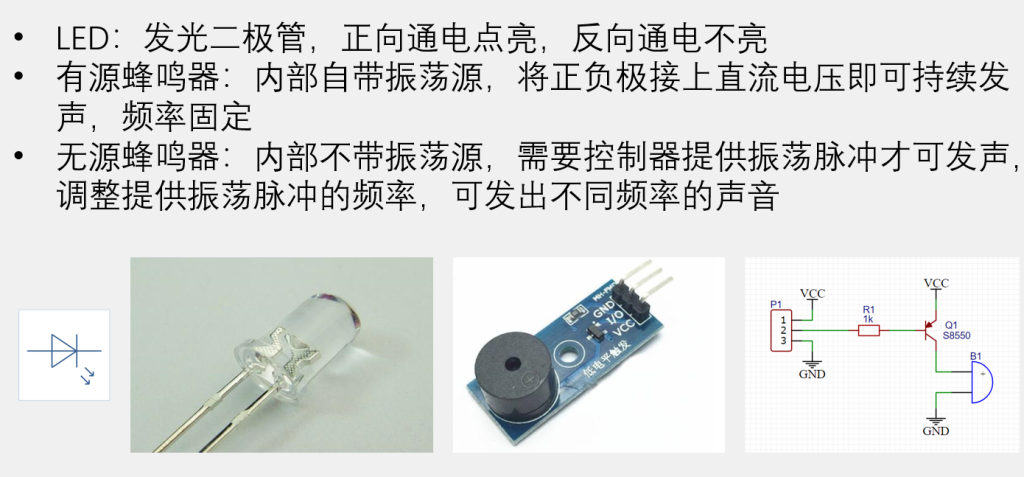
•LED:发光二极管,正向通电点亮,反向通电不亮
•有源蜂鸣器:内部自带振荡源,将正负极接上直流电压即可持续发声,频率固定
•无源蜂鸣器:内部不带振荡源,需要控制器提供振荡脉冲才可发声,调整提供振荡脉冲的频率,可发出不同频率的声音
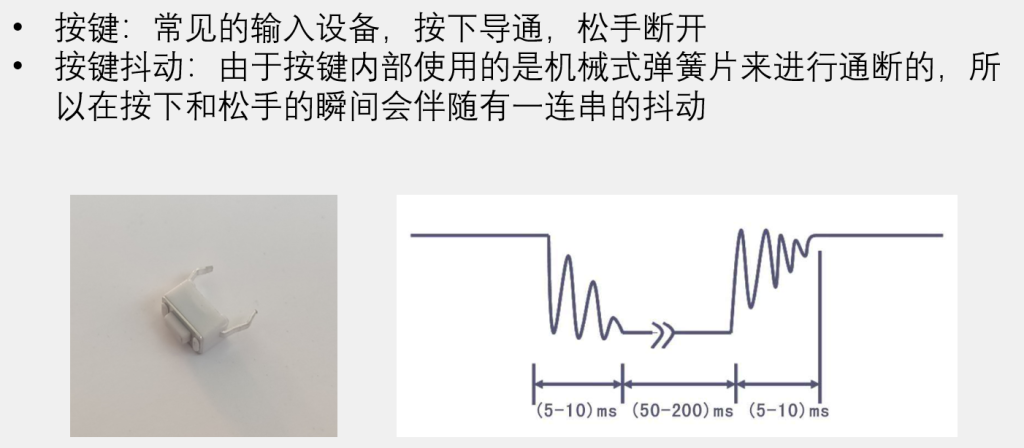
按键简介
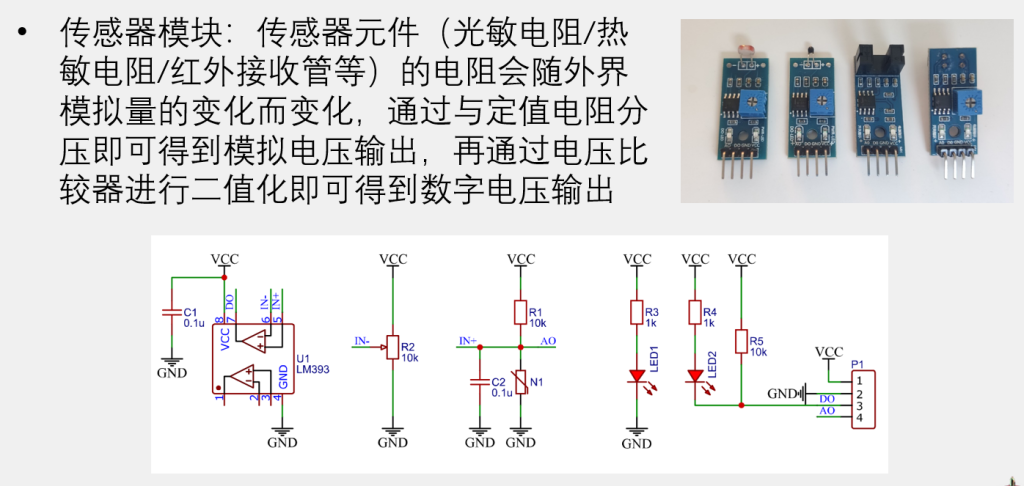
传感器模块简介
代码部分
板子为正点原子精英版V2
延迟函数
直接从B站江科大那里拿的
#include "stm32f10x.h"
/**
* @brief 微秒级延时
* @param xus 延时时长,范围:0~233015
* @retval 无
*/
void Delay_us(uint32_t xus)
{
SysTick->LOAD = 72 * xus; //设置定时器重装值
SysTick->VAL = 0x00; //清空当前计数值
SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器
while(!(SysTick->CTRL & 0x00010000)); //等待计数到0
SysTick->CTRL = 0x00000004; //关闭定时器
}
/**
* @brief 毫秒级延时
* @param xms 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_ms(uint32_t xms)
{
while(xms--)
{
Delay_us(1000);
}
}
/**
* @brief 秒级延时
* @param xs 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_s(uint32_t xs)
{
while(xs--)
{
Delay_ms(1000);
}
}
经典跑马灯
LED模块
#include "stm32f10x.h" // Device header
void LED_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 时钟初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure; //定义GPIO口结构体
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 设置为开漏推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; // 对应PIN口
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitTypeDef GPIO_InitStructure2;
GPIO_InitStructure2.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure2.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure2.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOE, &GPIO_InitStructure2);
GPIO_SetBits(GPIOB, GPIO_Pin_5); // 设置高电平默认关灯
GPIO_SetBits(GPIOE, GPIO_Pin_5);
}
void LED1_ON(void)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_5); // 设置低电平开灯
}
void LED1_OFF(void)
{
GPIO_SetBits(GPIOB, GPIO_Pin_5); // 设置高电平关灯
}
void LED1_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_5) == 0) // 读取输出数据(0为低电平,1为高电平,等于0即当前为开灯)
{
GPIO_SetBits(GPIOB, GPIO_Pin_5);
}
else
{
GPIO_ResetBits(GPIOB, GPIO_Pin_5);
}
}
void LED2_ON(void)
{
GPIO_ResetBits(GPIOE, GPIO_Pin_5);
}
void LED2_OFF(void)
{
GPIO_SetBits(GPIOE, GPIO_Pin_5);
}
void LED2_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOE, GPIO_Pin_5) == 0)
{
GPIO_SetBits(GPIOE, GPIO_Pin_5);
}
else
{
GPIO_ResetBits(GPIOE, GPIO_Pin_5);
}
}
主函数
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
int main(void){
while(1){
LED1_ON();
Delay_ms(1000);
LED1_OFF();
Delay_ms(1000);
}
}
按键控制LED
按键模块
#include "stm32f10x.h" // Device header
#include "Delay.h"
void Key_Init(void){
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE,ENABLE); //时钟初始化
GPIO_InitTypeDef GPIO_InitStructure; //初始化GPIO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //采用上拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_4;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOE,&GPIO_InitStructure);
}
uint8_t Key_GetNum(void){
uint8_t KeyNum = 0;
if(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_3) == 0){ //按下时判断式子为0,即返回值为1,识别按键1成功(0为低电平,即按下)
Delay_ms(20); //延迟消抖
while(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_3) == 0);
Delay_ms(20);
KeyNum = 1;
}
if(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4) == 0){ //按下时判断式子为0,即返回值为2,识别按键2成功
Delay_ms(20);
while(GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4) == 0);
Delay_ms(20);
KeyNum = 2;
}
return KeyNum;
}

Comments NOTHING