
服务通信理论模型
服务通信较之于话题通信更简单些,理论模型如下图所示,该模型中涉及到三个角色:
- ROS master(管理者)
- Server(服务端)
- Client(客户端)
ROS Master 负责保管 Server 和 Client 注册的信息,并匹配话题相同的 Server 与 Client ,帮助 Server 与 Client 建立连接,连接建立后,Client 发送请求信息,Server 返回响应信息。
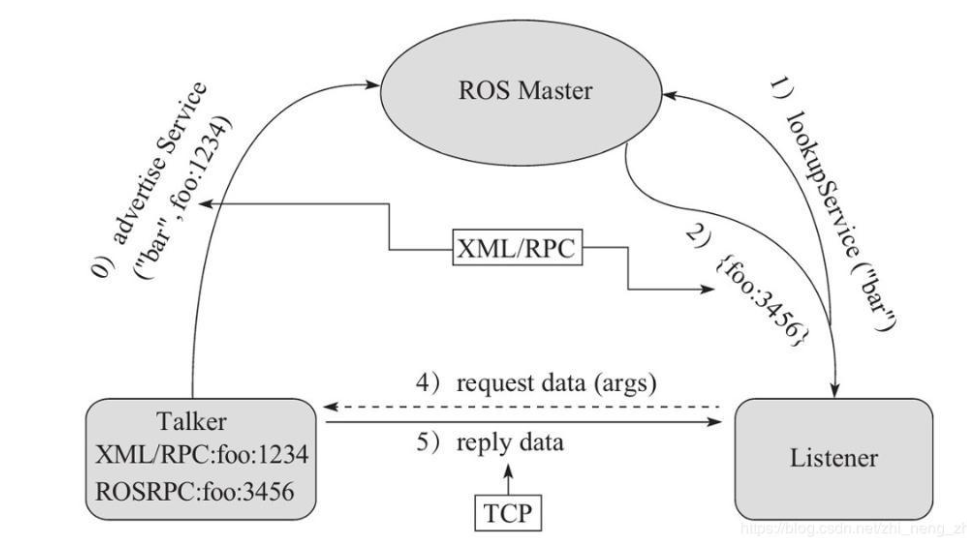
整个流程由以下步骤实现:
0.Server注册
Server 启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含提供的服务的名称。ROS Master 会将节点的注册信息加入到注册表中。
1.Client注册
Client 启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要请求的服务的名称。ROS Master 会将节点的注册信息加入到注册表中。
2.ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Server和 Client,并通过 RPC 向 Client 发送 Server 的 TCP 地址信息。
3.Client发送请求
Client 根据步骤2 响应的信息,使用 TCP 与 Server 建立网络连接,并发送请求数据。
4.Server发送响应
Server 接收、解析请求的数据,并产生响应结果返回给 Client。
注意:
1.客户端请求被处理时,需要保证服务器已经启动;
2.服务端和客户端都可以存在多个。
自定义Srv
1.定义srv文件
服务通信中,数据分成两部分,请求与响应,在 srv 文件中请求和响应使用---分割,具体实现如下:
功能包下新建 srv 目录,添加 xxx.srv 文件,内容:
# 客户端请求时发送的两个数字
int32 num1
int32 num2
---
# 服务器响应发送的数据
int32 sum2.编辑配置文件
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
<!--
exce_depend 以前对应的是 run_depend 现在非法
-->CMakeLists.txt编辑 srv 相关配置
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
# 需要加入 message_generation,必须有 std_msgs
add_service_files(
FILES
AddInts.srv
)
generate_messages(
DEPENDENCIES
std_msgs
)注意: 官网没有在 catkin_package 中配置 message_runtime,经测试配置也可以,不过最好还是加上
#执行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo02_talker_listener
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)3.编写发布方/接收方代码
4.再次配置CMakeLists.txt
配置①
add_executable(节点名称
src/C++源文件名.cpp
)
target_link_libraries(节点名称
${catkin_LIBRARIES}
)配置②
在①中的空白部分加入:
add_dependencies(demo_pub_person ${PROJECT_NAME}_generate_messages_cpp)5.编译运行即可
动态输入
流程:
- 需要先启动服务:
rosrun 包名 服务 - 然后再调用客户端 :
rosrun 包名 客户端 参数1 参数2
结果:
会根据提交的数据响应相加后的结果。
注意:
如果先启动客户端,那么会导致运行失败
优化:
在代码中的客户端发送请求前添加:client.waitForExistence();//挂起
这是一个阻塞式函数,只有服务启动成功后才会继续执行
此处可以使用 launch 文件优化,但是需要注意 args 传参特点!
Comments NOTHING