
内容纲要
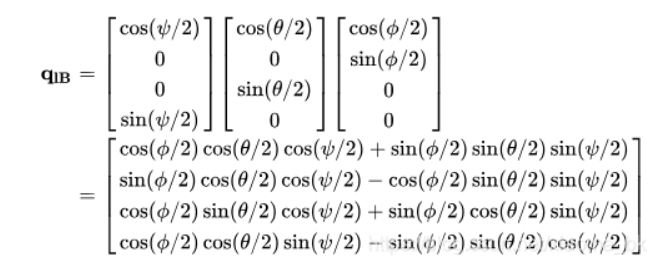
欧拉角到四元数的转换
公式:
struct Quaternion
{
double w, x, y, z;
};
Quaternion ToQuaternion(float yaw, float pitch, float roll,float q[])) // yaw (Z), pitch (Y), roll (X)
{
float cy = cos(yaw * 0.5);
float sy = sin(yaw * 0.5);
float cp = cos(pitch * 0.5);
float sp = sin(pitch * 0.5);
float cr = cos(roll * 0.5);
float sr = sin(roll * 0.5);
q[3] = cy * cp * cr + sy * sp * sr; // w
q[0] = cy * cp * sr - sy * sp * cr; // x
q[1] = sy * cp * sr + cy * sp * cr; // y
q[2] = sy * cp * cr - cy * sp * sr; // z
return q;
}
Comments NOTHING